












I cookie ci aiutano a offrire i nostri servizi. Utilizzando i nostri servizi, acconsentite al nostro utilizzo dei cookie.
- Registrati
- Accesso
-
Carrello
(0)
Non ci sono articoli nel tuo carrello
Cerca
FIRST Componens Academy | Compatibilità MIPI DSI e timing nell’integrazione dei display
venerdì 20 marzo 2026
Dalla News di Winstar di Marzo '26
Compatibilità MIPI DSI e meccanismi di timing nell’integrazione dei sistemi display
Nello sviluppo di prodotti display e nell’integrazione di sistemi, non è raro riscontrare errori di inizializzazione o comportamenti instabili del display, anche quando sia il SoC host sia il driver IC del display (DDIC) sono dichiarati conformi allo standard MIPI DSI.
I sintomi tipici includono schermi neri, linee di rumore verticali intermittenti o una stabilità del display incoerente tra diverse piattaforme hardware. Questi problemi sono spesso attribuiti all’hardware del pannello o alle sequenze di inizializzazione. Tuttavia, l’esperienza pratica di integrazione dimostra che la causa principale è frequentemente legata al margine di timing del D-PHY durante la transizione da LP a HS, piuttosto che a incompatibilità a livello di protocollo.
Se il comportamento del livello fisico e le condizioni al contorno del sistema non vengono valutati nelle fasi iniziali di progettazione, possono comunque verificarsi rischi di integrazione, anche quando il pannello è pienamente conforme alla specifica MIPI.
Architettura MIPI DSI e interazione tra livelli
MIPI DSI è composto da due livelli principali:
Livello Fisico (D-PHY / C-PHY)
Responsabile di:
• Trasmissione dei segnali elettrici
• Transizioni di stato delle linee
• Trasferimento dati ad alta velocità
• Controllo della finestra di timing
Livello di Protocollo
Responsabile di:
• Definizione della struttura dei pacchetti
• Header format Formato dell’header
• Protezione ECC/CRC
• Organizzazione dei dati in modalità comando e video
Nell’integrazione pratica dei sistemi, se il timing del livello fisico non rientra nella finestra di rilevamento accettabile del ricevitore, la sincronizzazione dei pacchetti e l’analisi degli header possono fallire, attivando i meccanismi di gestione degli errori a livello di protocollo.
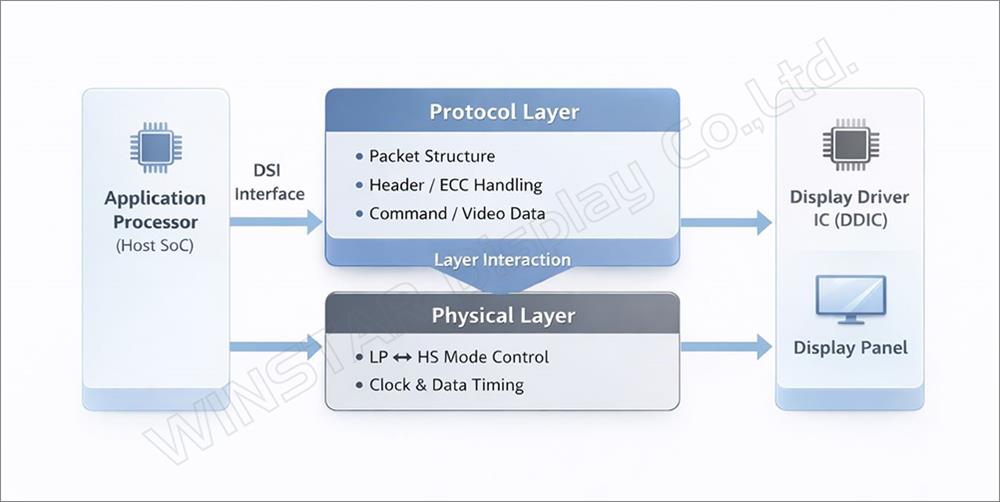
【Figura 1】 Architettura a livello di sistema MIPI DSI e interazione tra livelli
Meccanismo di trasmissione D-PHY e sensibilità al timing
MIPI DSI utilizza una trasmissione DDR (Double Data Rate), campionando i dati sia sul fronte di salita che su quello di discesa del clock.
• La durata di un bit è definita come Unit Interval (UI)
• Un ciclo DDR equivale a 2 × UI
All’aumentare della velocità dati del D-PHY, aumenta anche la sensibilità del sistema nelle seguenti aree:
• Jitter del PLL
• Timing della transizione LP-to-HS
• Ritardo di avvio del ricevitore
• Integrità del segnale
Sebbene velocità dati più elevate migliorino le prestazioni del display, riducono anche il margine di timing disponibile.
Transizione LP-to-HS e requisiti di timing
Prima di entrare in modalità High-Speed (HS), il trasmettitore deve completare la transizione LP-to-HS:
• LP-11 (Idle)
• LP-01 → LP-00
• THS-PREPARE
• THS-ZERO
• SoT (Start of Transmission)
Secondo la specifica D-PHY v1.1: THS-PREPARE + THS-ZERO > 145 ns + 10 × UI
Tuttavia, nell’integrazione reale dei sistemi display, il rispetto del limite minimo della specifica potrebbe non garantire la stabilità tra diverse piattaforme. Nella progettazione ingegneristica pratica, è generalmente necessario un margine di timing aggiuntivo per ridurre il rischio di integrazione.
![]()
【Figura 2】 Diagramma di timing della transizione LP-to-HS MIPI D-PHY
Osservazione pratica: requisiti HS-Settle oltre il minimo teorico
Durante il test di avvio (bring-up) MIPI DSI su diverse piattaforme, è stato osservato che, in alcune piattaforme SoC basate su ARM abbinate a dispositivi DDIC DSI v1.1, per un funzionamento stabile del display era necessario: THS-PREPARE + THS-ZERO > 215 ns
Questo comportamento è legato alle caratteristiche progettuali del lato ricevitore:
• Il ricevitore HS richiede tempo di stabilizzazione prima del campionamento
• I meccanismi di filtraggio interni introducono un ritardo di rilevamento
• Se la trasmissione SoT avviene troppo presto, l’avvio del ricevitore può essere incompleto
Quando il rilevamento SoT fallisce:
• Errore di allineamento dei byte
• Errori di parsing dell’header
• Mancata corrispondenza ECC
• Scarto del pacchetto
A livello di sistema, questi errori si manifestano tipicamente come schermi neri o output del display instabile.
Rilevamento SoT e integrità dei pacchetti
SoT (Start of Transmission) è la sequenza di sincronizzazione che segna l’inizio dei dati ad alta velocità.
Il ricevitore deve riuscire a:
• Entrare in modalità HS
• Agganciare il timing
• Eseguire il campionamento a livello di bit nella finestra temporale corretta
Se il rilevamento SoT fallisce, possono verificarsi i seguenti problemi:
• Errori di allineamento dei byte
• Errore di decodifica dell’header
• Errori di verifica ECC
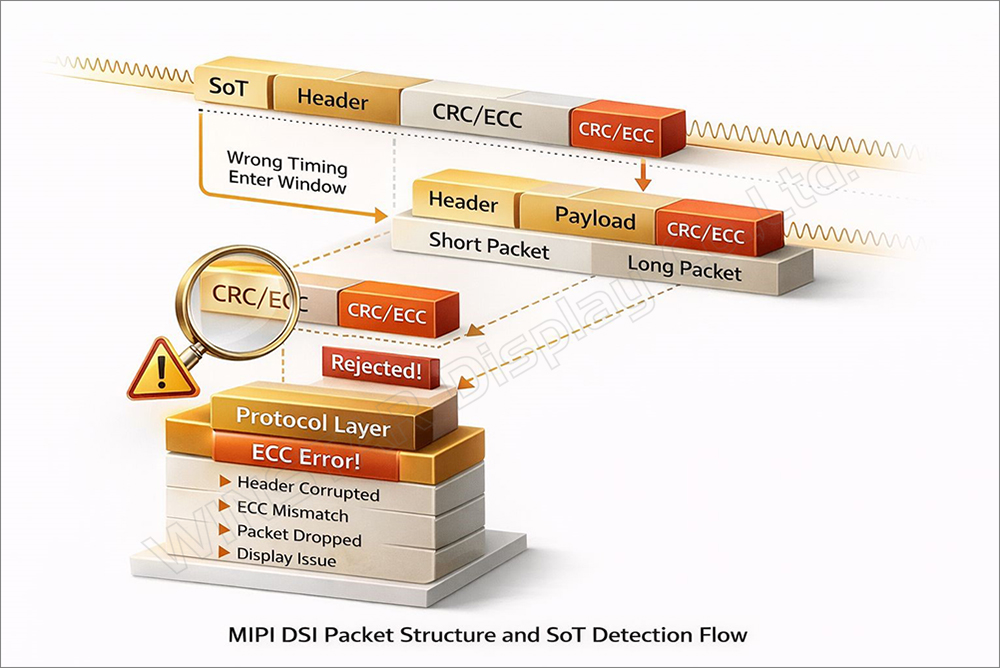
【Figura 3】 Struttura dei pacchetti MIPI DSI e flusso di rilevamento SoT
Compatibilità tra versioni DSI e differenze tra piattaforme
La corrispondenza delle versioni DSI indica solo compatibilità a livello di specifica. Non garantisce un comportamento implementativo identico.
Le diverse piattaforme SoC possono differire in:
• Architettura del PLL
• Parametri regolabili di timing di transizione
• Meccanismi di rilevamento HS-Settle del ricevitore
• Metodi di configurazione del tuning PHY
Alcune piattaforme offrono intervalli di regolazione limitati per i parametri di timing del D-PHY, il che può ridurre la flessibilità di integrazione.
Pertanto, l’integrazione del sistema display dovrebbe valutare le reali caratteristiche di implementazione della piattaforma e la capacità di tuning, piuttosto che basarsi esclusivamente sulla conformità alla versione.
Considerazioni ingegneristiche nell’integrazione dei sistemi display
La compatibilità MIPI DSI è influenzata da molteplici fattori a livello di sistema:
• Architettura PHY del SoC e caratteristiche di jitter
• Controllo dell’impedenza del PCB e integrità del segnale
• Stabilità dell’alimentazione
• EMI e condizioni ambientali di rumore
• Circuiteria di bridge IC o adattatori
Esperienza pratica WINSTAR nell’integrazione MIPI DSI
Attraverso progetti di bring-up e validazione di compatibilità MIPI DSI su diverse piattaforme, WINSTAR ha osservato che il margine di timing del livello fisico e il comportamento di rilevamento del ricevitore influenzano significativamente la stabilità complessiva del sistema.
Durante i progetti di integrazione display, WINSTAR include i seguenti step di validazione:
• Analisi del margine di transizione LP-to-HS
• Test di stabilità del rilevamento SoT
• Verifica incrociata multi-piattaforma
• Valutazione dell’integrità del segnale PCB
• Valutazione della compatibilità modulo-piattaforma
Conclusione
MIPI DSI è un’interfaccia display ad alte prestazioni. Tuttavia, la compatibilità reale non è determinata esclusivamente dalla conformità alla specifica.
La pratica ingegneristica dimostra che:
• I valori minimi di specifica rappresentano requisiti di base; un margine di timing aggiuntivo è spesso necessario per un’integrazione stabile.
• I livelli PHY e Protocol devono essere valutati congiuntamente.
• Le differenze di implementazione tra piattaforme possono influenzare il rilevamento SoT e il lock dei dati.
• L’integrazione del sistema display richiede validazione del timing cross-layer e della stabilità dei pacchetti.
Valutare il margine della transizione LP-to-HS e il comportamento di avvio del ricevitore nelle fasi iniziali dello sviluppo prodotto può ridurre significativamente i rischi di integrazione nelle fasi finali.
FAQ – Integrazione e timing MIPI DSI
D1: Perché può verificarsi uno schermo nero anche se la specifica DSI è rispettata?
Anche se la specifica è rispettata, un margine insufficiente nella transizione LP-to-HS può causare il fallimento del rilevamento SoT, portando allo scarto dei pacchetti e all’assenza di output video.
D2: La corrispondenza della versione DSI garantisce la compatibilità?
No. Differenze nell’implementazione del PHY e del ricevitore tra piattaforme possono influenzare la compatibilità reale.
D3: È sufficiente rispettare il minimo della specifica HS-Settle?
Nell’integrazione pratica multi-piattaforma, è spesso necessario un margine di timing aggiuntivo per un funzionamento stabile.
D4: Perché è necessaria una validazione cross-layer nell’integrazione dei display?
Perché la compatibilità DSI è influenzata sia dal livello fisico che da quello di protocollo; è quindi necessaria una validazione a livello di sistema per garantire prestazioni stabili.